by J.D. Hair&Associates, Inc.
The tools and techniques used in the horizontal directional drilling (HDD) process are an
outgrowth of the oil well drilling industry. The components of a horizontal drilling rig used for
pipeline construction are similar to those of an oil well drilling rig with the major exception being
that a horizontal drilling rig is equipped with an inclined ramp as opposed to a vertical mast. HDD
pilot hole operations are not unlike those involved in drilling a directional oil well. Drill pipe and
downhole tools are generally interchangeable and drilling fluid is used throughout the operation to
transport drilled spoil, reduce friction, stabilize the hole, etc. Because of these similarities, the
process is generally referred to as drilling as opposed to boring.
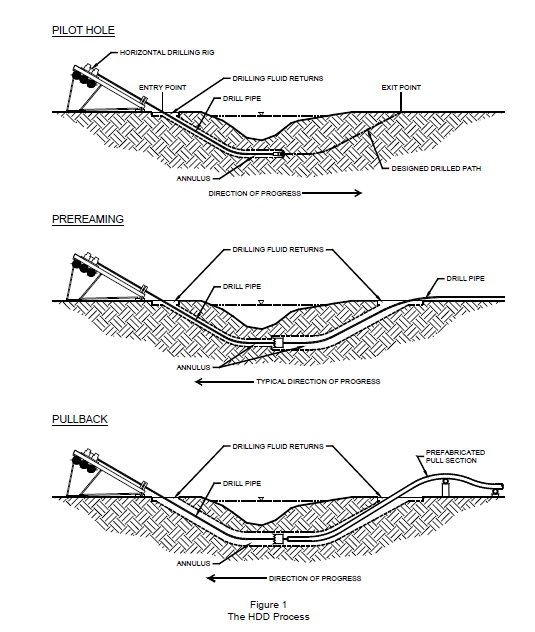
Installation of a pipeline by HDD is generally accomplished in three stages as illustrated in
Figure 1. The first stage consists of directionally drilling a small diameter pilot hole along a
designed directional path. The second stage involves enlarging this pilot hole to a diameter
suitable for installation of the pipeline. The third stage consists of pulling the pipeline back into the
enlarged hole.

Pilot Hole Directional Drilling
Pilot hole directional control is achieved by using a non-rotating drill string with an asymmetrical
leading edge. The asymmetry of the leading edge creates a steering bias while the non-rotating
aspect of the drill string allows the steering bias to be held in a specific position while drilling. If a
change in direction is required, the drill string is rolled so that the direction of bias is the same as
the desired change in direction. The direction of bias is referred to as the tool face. Straight
progress may be achieved by drilling with a series of offsetting tool face positions. The drill string
may also be continually rotated where directional control is not required. Leading edge
asymmetry can be accomplished by several methods. Typically, the leading edge will have an
angular offset created by a bent sub or bent motor housing. This is illustrated schematically in
Figure 2.
It is common in soft soils to achieve drilling progress by hydraulic cutting with a jet nozzle. In this
case, the direction of flow from the nozzle can be offset from the central axis of the drill string
thereby creating a steering bias. This may be accomplished by blocking selected nozzles on a
standard roller cone bit or by custom fabricating a jet deflection bit. If hard spots are encountered,
the drill string may be rotated to drill without directional control until the hard spot has been
penetrated.
Downhole Motors
Downhole mechanical cutting action required for harder soils is provided by downhole hydraulic
motors. Downhole hydraulic motors, commonly referred to as mud motors, convert hydraulic
energy from drilling mud pumped from the surface to mechanical energy at the bit. This allows for
bit rotation without drill string rotation. There are two basic types of mud motors; positive
displacement and turbine. Positive displacement motors are typically used in HDD applications.
Basically, a positive displacement mud motor consists of a spiral-shaped stator containing a
sinusoidal shaped rotor. Mud flow through the stator imparts rotation to the rotor which is in turn
connected through a linkage to the bit.
In some cases, a larger diameter wash pipe may be rotated concentrically over the non-rotating
steerable drill string. This serves to prevent sticking of the steerable string and allows its tool face
to be freely oriented. It also maintains the pilot hole if it becomes necessary to withdraw the
steerable string.
Downhole Surveying
The actual path of the pilot hole is monitored during drilling by taking periodic readings of the
inclination and azimuth of the leading edge. Readings are taken with an instrument, commonly
referred to as a probe, inserted in a drill collar as close as possible to the drill bit. Transmission of
downhole probe survey readings to the surface is generally accomplished through a wire running
inside the drill string. These readings, in conjunction with measurements of the distance drilled
since the last survey, are used to calculate the horizontal and vertical coordinates along the pilot
hole relative to the initial entry point on the surface.
Azimuth readings are taken from the earth's magnetic field and are subject to interference from
downhole tools, drill pipe, and magnetic fields created by adjacent structures. Therefore, the
probe must be inserted in a non magnetic collar and positioned in the string so that it is
adequately isolated from downhole tools and drill pipe. The combination of bit, mud motor (if
used), subs, survey probe, and non magnetic collars is referred to as the Bottom Hole Assembly
or BHA. A typical bottom hole assembly is shown as Figure 2.
Surface Monitoring
{kind=link}
The pilot hole path may also be tracked using a surface monitoring system. Surface monitoring
systems determine the location of the probe downhole by taking measurements from a grid or
point on the surface. An example of this is the TruTracker System. This system uses a surface
coil of known location to induce a magnetic field. The probe senses its location relative to this
induced magnetic field and communicates this information to the surface. This is shown
schematically in Figure 3.

Reaming & Pullback
Enlarging the pilot hole is accomplished using either prereaming passes prior to pipe installation
or simultaneously during pipe installation. Reaming tools typically consist of a circular array of
cutters and drilling fluid jets and are often custom made by contractors for a particular hole size or
type of soil.
Prereaming
Most contractors will opt to preream a pilot hole before attempting to install pipe. For a
prereaming pass, reamers attached to the drill string at the exit point are rotated and drawn to the
drilling rig thus enlarging the pilot hole. Drill pipe is added behind the reamers as they progress
toward the drill rig. This insures that a string of pipe is always maintained in the drilled hole. It is
also possible to ream away from the drill rig. In this case, reamers fitted into the drill string at the
rig are rotated and thrust away from it.
Pullback
Pipe installation is accomplished by attaching the prefabricated pipeline pull section behind a
reaming assembly at the exit point and pulling the reaming assembly and pull section back to the
drilling rig. This is undertaken after completion of prereaming or, for smaller diameter lines in soft
soils, directly after completion of the pilot hole. A swivel is utilized to connect the pull section to
the leading reaming assembly to minimize torsion transmitted to the pipe. The pull section is
supported using some combination of roller stands, pipe handling equipment, or a flotation ditch
to minimize tension and prevent damage to the pipe.
Buoyancy Control
Uplift forces resulting from the buoyancy of larger diameter lines can be very substantial. High
pulling forces may be required to overcome drag resulting from buoyancy uplift. Therefore,
contractors will often implement measures to control the buoyancy of pipe 30 inches or over in
diameter. The most common method of controlling buoyancy is to fill the pipe with water as it
enters the hole. This requires an internal fill line to discharge water at the leading edge of the pull
section (after the breakover point). An air line may also be required to break the vacuum which
may form at the leading edge as the pull section is pulled up to the rig. The amount of water
placed in the pipe is controlled to provide the most advantageous distribution of buoyant forces.
Some contractors may choose to establish a constant buoyancy. This can be accomplished by
inserting a smaller diameter line into the pull section and filling the smaller line with water. The
smaller line is sized to hold the volume of water required per lineal foot to offset the uplift forces.
Source: http://www.fws.gov/midwest/Endangered/permits/hcp/nisource/2013NOA/pdf/NiSourceHCPfinalAppndxJ_HDD.pdf. Acessed by 23-1-2014
Thanks for this great post... I was looking forward to get such a post which is very helpful to us. Keep it up. . Wuhan Yichao Technology Equipment Co., Ltd sells XCMG series
BalasHapushdd rig
horizontal drilling rig
horizontal drilling machine
directional drilling machine manufacturer
directional drilling equipment manufacturer